









 Happy’s Tech Talk #28: The Power Mesh Architecture for PCBs
Happy’s Tech Talk #28: The Power Mesh Architecture for PCBs It’s Only Common Sense: Would You Join Your Own Company?
It’s Only Common Sense: Would You Join Your Own Company? The Chemical Connection: Reducing Etch System Water Usage, Part 2
The Chemical Connection: Reducing Etch System Water Usage, Part 2Now You Can 'Build Your Own' Bio-Bot
February 13, 2017 | University of Illinois College of EngineeringEstimated reading time: 2 minutes
For the past several years, researchers at the University of Illinois at Urbana-Champaign have been developing a class of walking "bio-bots" powered by muscle cells and controlled with electrical and optical pulses. Now, Bioengineering Professor Rashid Bashir’s research group is sharing the recipe for the current generation of bio-bots. Their how-to paper is the cover article in Nature Protocols.
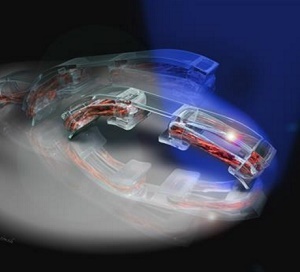
Schematic of a bio-bot: Engineered skeletal muscle tissue is coupled to a 3D printed flexible skeleton. Optical stimulation of the muscle tissue, which is genetically engineered to contract in response to blue light, makes the bio-bot walk across a surface in the direction of the light.
“The protocol teaches every step of building a bio-bot, from 3D printing the skeleton to tissue engineering the skeletal muscle actuator, including manufacturers and part numbers for every single thing we use in the lab,” explained Ritu Raman, now a postdoctoral fellow in the Department of Bioengineering and first author of the paper, “A modular approach to the design, fabrication, and characterization of muscle-powered biological machines.”
“This protocol is essentially intended to be a one-stop reference for any scientist around the world who wants to replicate the results we showed in our PNAS 2016 and PNAS 2014 papers, and give them a framework for building their own bio-bots for a variety of applications,” Raman said.
As stated in the paper, "Biological machines consisting of cells and biomaterials have the potential to dynamically sense, process, respond, and adapt to environmental signals in real time." This can result in exciting possibilities where these "systems could one day demonstrate complex behaviors including self-assembly, self-organization, self-healing, and adaptation of composition and functionality to best suit their environment."
Bashir's group has been a pioneer in designing and building bio-bots, less than a centimeter in size, made of flexible 3D printed hydrogels and living cells. In 2012, the group demonstrated bio-bots that could "walk" on their own, powered by beating heart cells from rats. However, heart cells constantly contract, denying researchers control over the bot's motion.
“The purpose of the paper was to provide the detailed recipes and protocols so that others can easily duplicate the work and help to further permeate the idea of 'building with biology’--so that other researchers and educators can have the tools and the knowledge to build these bio-hybrid systems and attempt to address challenges in health, medicine, and environment that we face as a society,” stated Rashid Bashir, a Grainger Distinguished Chair in Engineering and head of the Department of Bioengineering.
“The 3D printing revolution has given us the tools required to ‘build with biology’ in this way.” Raman said. “We re-designed the 3D-printed injection mold to produce skeletal muscle ‘rings’ that could be manually transferred to any of a wide variety of bio-bot skeletons. These rings were shown to produce passive and active tension forces similar to those generated by muscle strips.
"Using optogenetics techniques, we worked with collaborators at MIT to genetically engineer a light-responsive skeletal muscle cell line that could be stimulated to contract by pulses of 470-nm blue light," Raman added. "The resultant optogenetic muscle rings were coupled to multi-legged bio-bot skeletons with symmetric geometric designs. Localized stimulation of contraction, rendered possible by the greater spatiotemporal control of light stimuli over electrical stimuli, was used to drive directional locomotion and 2D rotational steering.”
In addition to Bashir and Raman, Caroline Cvetkovic, a recent graduate student in bioengineering and now a post-doctoral fellow was a co-author of the paper. Work on the bio-bots was conducted at the Micro + Nanotechnology Lab at Illinois.
Share on:




Suggested Items
It’s Only Common Sense: Would You Join Your Own Company?
05/06/2024 | Dan Beaulieu -- Column: It's Only Common SenseIn the past few years, I have heard many company runners complaining about their workforce. They tell me that the government is paying people too much money not to work, too many young people are not interested in working every day, and there is just not the work ethic there once was when they were young.
Warm Windows and Streamlined Skin Patches – IDTechEx Explores Flexible and Printed Electronics
04/26/2024 | IDTechExFlexible and printed electronics can be integrated into cars and homes to create modern aesthetics that are beneficial and easy to use. From luminous car controls to food labels that communicate the quality of food, the uses of this technology are endless and can upgrade many areas of everyday life.
Scientists Propose a New Way to Search for Dark Matter
04/02/2024 | SLAC National Accelerator LaboratoryEver since its discovery, dark matter has remained invisible to scientists, despite the launch of multiple ultra-sensitive particle detector experiments around the world over several decades.
Walmart Acquires Vizio, Set to Overtake Samsung as the Largest TV Brand in the US
02/22/2024 | TrendForceUS retail giant Walmart announced on February 20, that it has acquired smart TV brand Vizio for US$2.3 billion, aiming to accelerate the growth of its advertising business: Walmart Connect. Since its launch in 2021, Walmart Connect has seen double-digit annual growth in both its online and offline retail media advertising ventures. Vizio has been expanding its device ecosystem and its SmartCast TV OS, boasting over 18 million active users, according to TrendForce.
Fiber Optic Cables Effective Way to Detect Tsunamis
02/16/2024 | University of MichiganFiber optic cables that line ocean floors could provide a less expensive, more comprehensive alternative to the current buoys that act as early warning systems for tsunamis, says a University of Michigan researcher.